DIPROニュース
進む実機レス制御検証の業務適用
『VPS/IOC Express』、『ICAD/SX 制御検証オプション』のご紹介
FA業界の開発現場では、早期のソフトウェア品質向上が、開発期間短縮のための大きなテーマになってきています。近年では3次元CADの普及が進み、このような課題を解決する手段として、装置の3次元モデルを活用した仮想メカによるソフトウェア検証の取り組みが始められています。しかし、実際の検証環境を構築する際に、「仮想メカの作成自体に時間がかかってしまう」、「本物の製品と著しく動作が異なるために検証効果が上がらない」といった問題がありました。
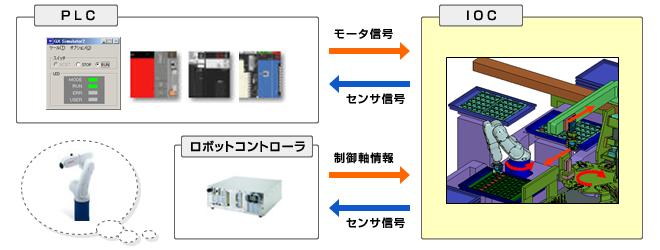
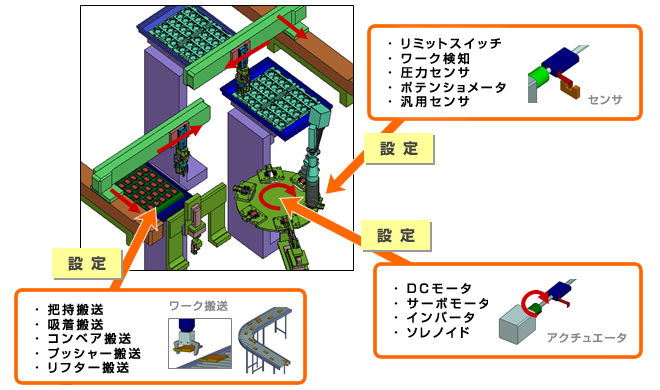
例えば、仮想メカの構築ではまず装置の可動部を表現し、それらを制御するために必要なアクチュエータやセンサを追加し、さらにワークを搬送するためには、コンベアやロボットなど搬送装置の定義が必要になります。一般的には、これらの構成を、お客様の環境に合わせて作成した特別なプログラムで実現することも少なくありませんでした。また、仮想メカのソフトウェア検証を行うためには、仮想メカ上に構築された仮想機器とそれらを制御するPLCやロボットコントローラなどの制御機器とを接続する仕組みが必要になります。多種多様な制御機器が存在するため、接続環境の構築にもノウハウが求められてきました。
『VPS/IOC Express』や『ICAD/SX 制御検証オプション』(以下、IOC)では、誰でも短期間で仮想メカを作成し、可動部やワーク数の多い大規模な装置でもスムーズに動作する検証環境を提供します。
仮想メカを表現するための豊富な仮想機器
IOCでは、仮想メカを作成するために必要な仮想機器を多数標準装備しています。そのため、それらを組み合わせるだけで、すぐにでもお客様環境に合わせた装置を再現できます。
アクチュエータの制御方法によって搬送状態が変化するワーク
ワークモデルでは、ワーク自体の動作シナリオを事前に書くのではなく、「ワークが搬送機器によって運ばれる」という状態をそのまま表現しています。従来の技術では、このような方式で高速な搬送処理を実現しようとすると、アクチュエータとワークの位置がずれるなどの問題がありました。しかし、独自に開発した技術によって、高速性能を維持したままより現実に近い動作の搬送を実現できるようになりました。
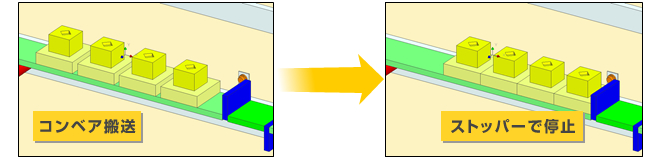
例えば、コンベア搬送機能ではストッパーによるワークの滞留、プッシャー/リフター機能(*1)では、ワークを押したり持ち上げるといったことが簡単にできます。これにより、最小限のワーク設定を行うだけで、無数にある搬送パターンを制御プログラムの変更のみで確認することができ、制御プログラムの記述ミスも発見できます。
*1 プッシャー/リフター機能は特許出願済み
通信方式の標準化技術への対応
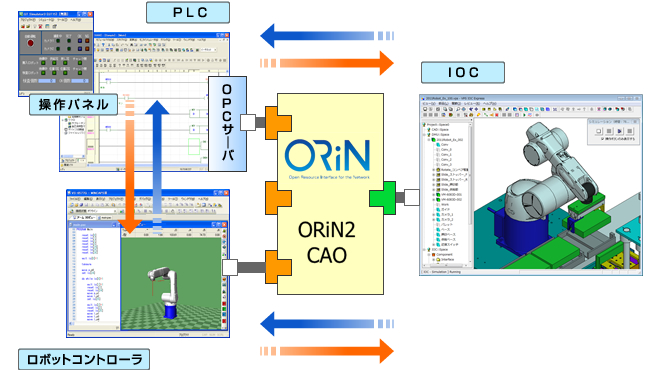
IOCと制御機器との接続を、機器固有の知識がなくても容易に実現できるようにするために、積極的に標準化技術との連携を行っています。PLCとの接続にはOPC(OLE for Process Control)を採用しており、日本におけるOPCサーバーのデファクトである株式会社たけびしと密に連携をとって推進しています。また、一般社団法人日本ロボット工業会内のORiN協議会にも準会員として参加し、ロボットや工作機械向け制御機器との接続を同会員の協力を得て実現してきました。
導入効果例
導入されたお客様からさまざまな効果の声をいただきました。
加工機メーカー様
- 制御デバッグにおける実機占有率を1/4に減らすことができた。
- 外的要因を排除して、ソフトウェアだけの単体テストが実施できた。
精密機械メーカー様
- 実機では発生させづらい状態を検証できた。
- 段取り時間が不要になった。(ワークを並べ直す必要がない)
- 仕様書の記載ミスを発見できた。(CW/CCWが逆、センサのON/OFFが逆、ストロークの間違い)
3次元データのさらなる活用を検討されており、制御開発の業務改善にお悩みのお客様は、弊社までお問い合わせください。誠意を持って支援させていただきます。
* 本稿の内容には、一部提供予定の内容を含みます。
(VPSビジネス部 川人)
PICK UP
-

ソーリンク様のVR活用 「顧客と共創する装置開発」 ~ 手戻りを減らし、対話を深め、信頼につなげる ~
-

Fujitsu デジタル生産準備VPSお客様事例 株式会社東光高岳 様
-

Teamcenter 製品アップデート 情報をより使いやすく! AI機能「Teamcenter Copilot」ご紹介
-

株式会社東野精機様 iCADフォルダ管理連携 システムの運用事例紹介
-

Fujitsu デジタル生産準備VPS お客様事例 創美クラフトポーランド株式会社 様
-

Teamcenter Assistant Preset(TCAP)ご紹介
-

VRを活用した生産準備業務のフロント ローディングへ向けて ~ 株式会社アドヴィックス様における Xphere活用事例 ~
-

3Dデータと点群データによる最先端VR営業 ~ 株式会社ヤマウラ様における VridgeR / Xphere活用事例 ~
-
COLMINA デジタル生産準備VPSお客様事例 株式会社SUBARU モノづくり本部 生産技術統括部 様
-

COLMINA デジタル生産準備VPSお客様事例 富士工業株式会社 ものづくり革新本部 技術部 技術2課 様
-

宇通バス様DIPROMEBIUSχの運用事例紹介
-

ポストコロナにおけるものづくり現場の デジタル化 ~ 株式会社ソーリンク様におけるXphere 活用事例 ~