MBD(モデルベース開発)エンジニアリングサービス
新着情報
MBDとは
MBDとは、モデルベース開発(Model Based Development)の頭文字を取った略語です。狭義では動的な数式モデルによる電子制御装置開発をすること、広義では実機ではなく「モデル」を使って開発を進めること(1Dだけでなく3Dも含む)を指して使われる言葉です。
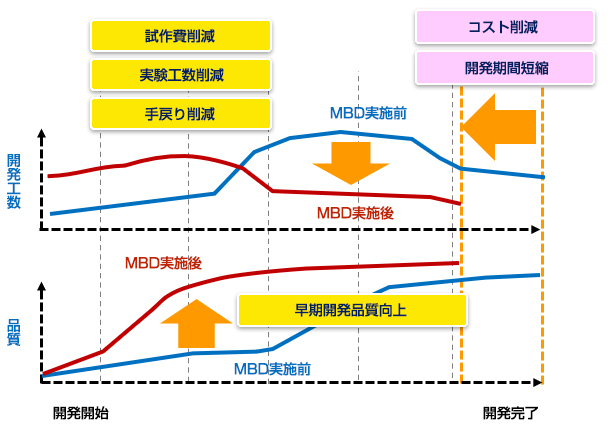
開発品質向上、試作や実験工数等のコスト削減、開発期間短縮等を狙い、それぞれの設計工程や検証工程でモデルを用いたシミュレーションで制御や制御対象(プラント)を開発していく手法のことです。
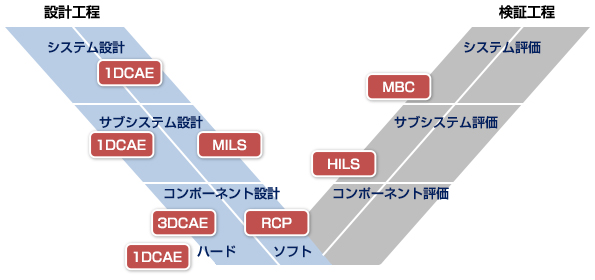
- ・1DCAE
- 上流段階から適用可能な設計支援の考え方、手法、ツール
日本機械学会 設計工学・システム部門WEBサイトより - ・MILS (Model In the Loop Simulation)
- モデルで記述したコントローラを、プラントモデルと結合して動作させるシミュレーション
- ・RCP (Rapid Control Prototyping)
- 汎用コントローラと実機プラント(試作機や前型機等)を用いて行うシミュレーション
- ・HILS
(Hardware In the Loop Simulation) - 実際のコントローラとプラントモデルを結合して動作させるシミュレーション
- ・MBC (Model Based Calibration)
- 実機ではなく「モデル」を使って制御の適合を行うこと
従来の開発プロセスでは、実機評価の段階で初めて仕様不整合や性能未達が発覚し、大きな手戻りが発生した結果、開発工数や期間が増大するということが課題となっていました。
MBDを適用した場合、開発品質の向上や試作の削減、実験工数の削減、手戻り削減による開発期間短縮とコスト削減等の効果が期待されます。