DIPROニュース
DIPROのSILSへの取り組み ~ Software In the Loop Simulation ~
メカトロニクスの発展に伴い、制御の検証技術も高度化が進んでいます。ソフトウェアによるシミュレーションであるSILSについて、当社の取り組みをご紹介します。
制御開発のデジタルシミュレーション
1. HILSとSILS
メカトロニクスにおける電子制御の発達と重要度の増大に伴って「制御とメカの連動系」をコンピューターでシミュレーションする技術の必要性がますます高まってきています。これは、制御機器の中のソフトウェアの指示による制御信号を制御対象機器のアクチュエーター(モーターなど)が受け取り、制御対象機器からのセンサー信号を制御機器が受け取って次の制御信号を出すという、一連の「フィードバックループ」をデジタルシミュレーションする技術のことです。HILS(Hardware In the Loop Simulation)とSILS(Software In the Loop Simulation)は、その代表例です(図1)。
HILSはフィードバックループの中に実機ハードウェアを含めるシミュレーションであり、図1のように制御対象機器をコンピューター・シミュレーションで行う場合を指すことが多いのですが、制御機器だけをシミュレーションで行うケースもあります。一方、SILSはフィードバックループ全体をシミュレーションで実行する形です。ここでは弊社で取り組んできたSILSについてご紹介します。
2. SILSの種類
SILSは制御対象機器のモデル化の手法から「ソフトウェアモデル型」と「3次元モデル型」2つに分類できます。ソフトウェアモデル型は、制御対象機器の挙動を何らかのソフトウェア(専用言語、数式など)でモデル化するものであり、フィードバックループが高速な場合に適しています。一方、3次元モデル型は制御対象機器のメカの部分を3次元形状モデルをベースにモデル化するもので、ビジュアル性にすぐれ、干渉停止などの形状依存挙動も再現しやすいという点があります。
最終制御対象物が何かによっても、2つに分類できます。「メカ型」は最終制御対象物がメカとして扱えるものであり、例えば工場現場で使われるFA機器などが該当します。FA機器が対象とする「ワーク」はメカの一部としてのモデル化が可能です。一方「ハイブリッド型」は、最終制御対象物が流体(気体、液体)や柔軟物(紙など)などのメカとしてはモデル化できないものを含む場合であり、それがメカと連動することによって制御対象機器が構成されているケースです。紙の挙動まで考慮して複写機をシミュレーションする例はそれにあたります。クルマに搭載されている各種の制御対象機器には「メカ型」と「ハイブリッド型」の両方があります。
弊社で開発・提供しているパッケージソフトウェアであるVPS/IOC(以降、IOCと略)は「3次元モデル型のSILS」です。以降、3次元モデル型で、かつ「メカ型SILS」の代表的な適用であるFA機器を例に、IOCのソリューションを紹介します。
制御開発の課題
FA機器を中心とする制御開発には次のような課題があります。
制御ソフトウェアの複雑化
制御設計の初期段階では、従来手法(座標値データをEXCELで計算してチェックなど)の限界が来ています。また、テスト段階では制御対象機器の複雑化に伴って、実機を動作させたとしても制御ロジックの完全な把握や妥当性確認が困難になってきています。
プログラムの開発が個人依存
制御ソフトウェアの基本設計書ともいえる「タイミング・チャート」がドキュメントベースであり、個人依存、部署依存のことも多いという実情があります。開発工程も制御設計者に依存することが多く、ノウハウの伝達が困難になっています。
機器設計と制御設計のコミュニケーションの難しさ
制御の複雑化に伴い、機器設計者から機器の仕様を制御設計者に伝えることが必ずしも容易ではなくなり、手戻りが発生するようになってきました。
機器設計と制御設計のスケジュール不整合
実機がないために制御ソフトウェアのテストが開始できない、あるいはその逆で、制御ソフトウェアの開発遅れのために実機テストができない、といったケースが発生し「コンカレント開発」に支障をきたしています。
機器メインテナンスが困難
一品生産品のケースでは、装置が手元にないケース(顧客使用中の廃機種、海外現地法人で使用中機器など)があり、メンテナンスを困難にしています。また制御設計者本人しかメンテナンスできないのも問題です。
SILS実現のためのシステム環境
前項のそれぞれ課題に対して「3次元モデル型のSILS」が極めて有効な解決手段と言えます。それは、機器設計と制御設計の連携を高め、制御設計手順の標準化を進め、実機なしの制御プログラムデバッグを実現します。この目的のためIOCでは図2のようなSILS環境を用意しています。
1. 3次元形状モデル
3次元形状モデルはCADで作成しますが、IOCでは日本で使用されているほとんどの3次元CADからデータを取り込めるようにしています。この3次元形状モデルを「仮想メカ」としてシミュレーションを行います。
2. 機構モデルの作成
3次元形状モデルのベースの上にまず関節を定義し「機構モデル」を定義します。関節には、回転関節とスライド関節が用意されています。関節以外に複数のメカ部品が依存性をもって動作するケースを、IOCでは一般化してリレーションと呼んでいますが、これには、歯車、溝、方向拘束、直線拘束、外周拘束(カムなど)、ピン結合、クラッチなどがあります。
3. 制御モデルの作成
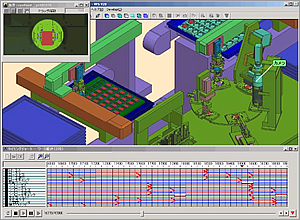
* シミュレーション状況を
仮想ロジックアナライザー(画面中ほど上)
に表示している。
制御対象機器を表現する中核が、アクチュエーター・センサー・搬送機構という「制御モデル」です。アクチュエーターにはパルスモーター、サーボモーター、位置決めコントローラー、DCモーター、ソレノイドなどがあります。また、センサーでは、干渉センサー、リミットセンサー、ポテンショ・メーター、オン・オフ・スイッチ、エンコーダーなどをモデル化できます。搬送機構・ワークのモデルでは、把持搬送(把持アーム、搬送テーブルなど)、吸着搬送(真空圧力センサーを含む)、コンベア搬送(カーブ型、ストレート型)、ワーク検知センサーなどが表現可能です。
4. 制御ロジックのモデル化
IOCの大きな特徴は制御ソフトウェアをコーディングする以前に、タイミングチャート(TC)で制御をモデル化してシミュレーションできることです。TCには2種類が用意されていて、関節TC(図3)は機構モデルの関節(縦軸)の動きを、時系列(横軸)で表したものとなっています。一方、信号TCは通常言われるTCであり、信号名(縦軸)ごとの信号をを時系列(横軸)で表現しています。これらの2種のTCを用いて仮想メカを駆動し、制御設計を進めることが可能になっています。
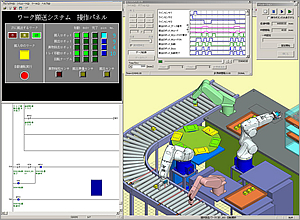
5. 制御機器シミュレーターとの結合、ORiNのサポート
制御機器メーカー様が提供する制御機器のエミュレーターと結合する部分です(図4)。OPCサーバーで結合するのが通常ですが、コントローラーとロボットなどとの接続標準仕様であるORiN(Open Resource interface for the Networkの略。オライン)で結合することも可能です。ORiNとインターフェースとして使うことにより、例えば異種制御対象機器(ロボットと搬送機器)などの同時制御をシミュレーションすることが容易になります。
SILSの技術ポイント
1. 実時間シミュレーション
「3次元モデル型のSILS」の最大の技術的課題は実時間によるシミュレーションです。具体的には、10ミリ秒程度のフィードバックループの間に、モーターの駆動、それによる3次元仮想メカの駆動、センサー信号の取得というループをソフトウェアでシミュレーションする必要があります。しかもモーター・センサーの合計数が数10個の場合には、個々のシミュレーションの許容時間は合計数で割った値となります。さらに3次元モデルは一般に「重い」ものが多く、仮想メカを実時間で動かしつつ、干渉計算なども行いながらフィードバックループをリアルタイムで実現するのは簡単ではありません。IOCでは性能向上のための数々の工夫をして実時間シミュレーションを実現しています。
2. タイミングチャートによるメカ駆動
IOCでは制御ソフトウェア作成以前に、ソフトウェアの仕様書とも言うべきタイミングチャート(TC)を用いて仮想メカを駆動し、制御設計・検討ができることが大きな特長です。しかもTCには機構設計者にも理解しやすい「関節TC」と、制御ソフトウェアの仕様ともいえる「信号TC」の二つのレベルを用意しています。このTCと仮想メカを使って、制御設計を大きく効率化できます。
導入効果
「3次元モデル型のSILS」を導入されたお客様では、
- ソフトウェア開発工数が20%以上削減された。
- 異常系のテストは実機では行わず、シミュレーションで済ませた。
- 実機テストにおけるトラブルの切り分けが早くなった。
(シミュレーションと実機で違う動きになると、制御ソフトウェア以外の原因だと推定できる)
などの効果が出ています。「3次元モデル型のSILS」の実務適用はまだ歴史が浅いと言えますが、今後も技術開発を通して、お客様のものづくりにおける品質向上・期間短縮に貢献していきたいと考えます。
(取締役 湯浅 英樹)
PICK UP
-

Fujitsu デジタル生産準備VPSお客様事例 株式会社東光高岳 様
-

Teamcenter 製品アップデート 情報をより使いやすく! AI機能「Teamcenter Copilot」ご紹介
-

株式会社東野精機様 iCADフォルダ管理連携 システムの運用事例紹介
-

Fujitsu デジタル生産準備VPS お客様事例 創美クラフトポーランド株式会社 様
-

Teamcenter Assistant Preset(TCAP)ご紹介
-

VRを活用した生産準備業務のフロント ローディングへ向けて ~ 株式会社アドヴィックス様における Xphere活用事例 ~
-

3Dデータと点群データによる最先端VR営業 ~ 株式会社ヤマウラ様における VridgeR / Xphere活用事例 ~
-
COLMINA デジタル生産準備VPSお客様事例 株式会社SUBARU モノづくり本部 生産技術統括部 様
-

COLMINA デジタル生産準備VPSお客様事例 富士工業株式会社 ものづくり革新本部 技術部 技術2課 様
-

宇通バス様DIPROMEBIUSχの運用事例紹介
-

ポストコロナにおけるものづくり現場の デジタル化 ~ 株式会社ソーリンク様におけるXphere 活用事例 ~
-

COLMINA デジタル生産準備VPSお客様事例 株式会社東海理化 グローバル生産技術部 様