Fujitsu デジタル生産準備 VPS
VPS IOC の概要:動作検討
早い段階で動作イメージ共有
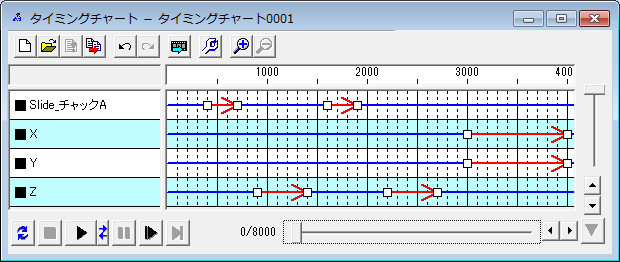
関節タイミングチャート
関節の設定をするだけで、簡単に動作アニメーションを作成することができます。
メカ設計と制御設計が早い段階で動作イメージの共有することにより、その後の作業の質を高めます。
(動的干渉の確認、付加する制御要素の確立 などにも有効)
- ※
- メカ設計部門でも、大変、有効な機能です。
特長
- 矢印をドラッグ移動したり、伸縮するだけで動作のタイミングや速度編集も直感的に行えます。
- 複数の動作パターンを作成できます。
- AVI形式の動画ファイルにも出力が可能です。
ワークを付加した動作検討
※ ワークに動作シナリオを設定するシナリオ型に対し、 VPS IOCでは条件によって挙動が変化するイベント型を採用しています。
特長
- アクチュエータの挙動にワークが忠実に従うので、意図しない制御ミスを発見できます。
(異常系の検証に特別な設定が不要) - 設定の手間がワーク数に依存しません。
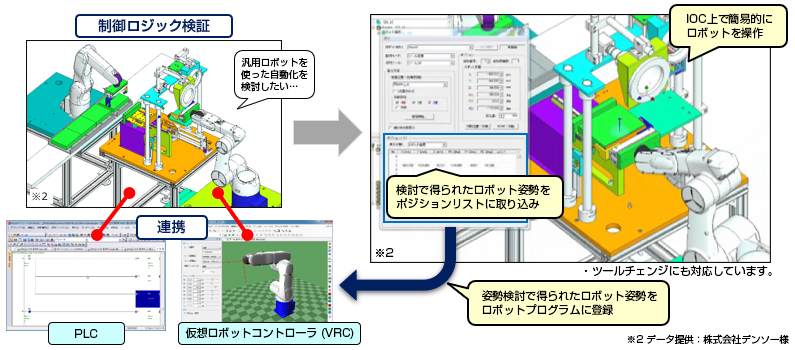
6軸垂直多関節、水平多関節(スカラ)ロボットの姿勢検討
ロボット操作
装置全体の3Dデータが揃っているVPS IOC上で簡易的に6軸垂直多関節ロボット、水平多関節(スカラ)ロボットの姿勢検討が行えます。実機では干渉リスクのあるロボットの姿勢検討をお手伝いする機能です。
記載されている商品名は各社の商標、または登録商標です。